Real Time Physics Experiment #2
Well.. now i'm starting to add more stuff to this system using several objects interacting with each other by the use of constraints. This time the task was a little harder because i needed a mechanism that controls the position of the whole set of objects, it's becoming hard to do this in maxscript, i guess that i have to start using C++ in the next experiments.
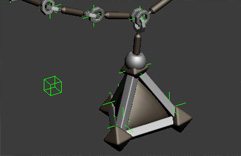
In this experiment i am only using a distance constraint within the points, in the case of the chain that we can see in the video i am using just a set of bones driven by a set of helpers (the bones are attached using position and lookat constraints), in order to simulate the right physic behavior the points have a distance limit with their neighbors in the simulation, they cannot go closer or further from them. The way of achieving this is just moving closer or further the pair of points per each constraint to satisfy the distance within them; This process has to be done after the forces have been applied to the points. If there are several constraints in the same point (like this case) the constraint process has to be done several times in multiple iterations.
If you are interested to learn more about the math behind it check the Constraint section in the Verlet integration topic in wikipedia: http://en.wikipedia.org/wiki/Verlet_integration
The Charm pendulum was simulated using four points with distance constraint with each other, the pendulum takes their position and orientation using position and lookat controllers, this is useful for simple simulations and simple objects like this one, i guess that i have to find a more advanced approach to simulate geometric rigid bodies.
In this experiment i am only using a distance constraint within the points, in the case of the chain that we can see in the video i am using just a set of bones driven by a set of helpers (the bones are attached using position and lookat constraints), in order to simulate the right physic behavior the points have a distance limit with their neighbors in the simulation, they cannot go closer or further from them. The way of achieving this is just moving closer or further the pair of points per each constraint to satisfy the distance within them; This process has to be done after the forces have been applied to the points. If there are several constraints in the same point (like this case) the constraint process has to be done several times in multiple iterations.
If you are interested to learn more about the math behind it check the Constraint section in the Verlet integration topic in wikipedia: http://en.wikipedia.org/wiki/Verlet_integration
The Charm pendulum was simulated using four points with distance constraint with each other, the pendulum takes their position and orientation using position and lookat controllers, this is useful for simple simulations and simple objects like this one, i guess that i have to find a more advanced approach to simulate geometric rigid bodies.
In this video i'm showing how it's working by now: